|
|
|
|
|
Коллективные процессы активности и управления в нейроморфных динамических сетях
Нейроморфные динамические сети повторяют иерархическое строение реальных нейронных систем, учитывают структуру и свойства индивидуальных нейронов и межнейронных связей. Под руководством В. И. Некоркина и В. Б. Казанцева выполнен цикл теоретических и экспериментальных исследований коллективной пространственно-временной активности нейроморфных динамических сетей.
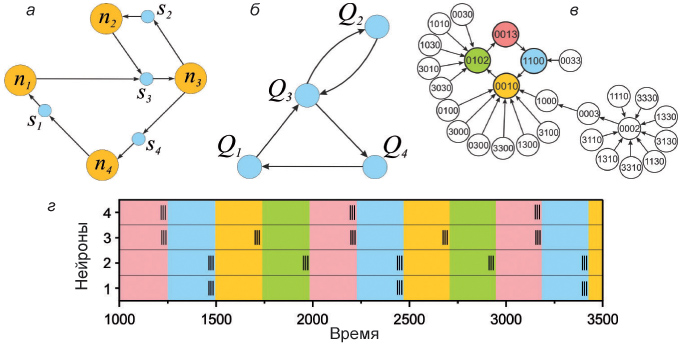
Клеточные автоматы на ориентированных графах синаптических связей в исследовании активности возбудимых нейронных сетей. Разработан новый метод, позволяющий описать и исследовать динамику нейронных сетей с возбуждающими синаптическими связями. В основе метода лежит редуцирование непрерывной динамики нейронных сетей к дискретной динамике клеточных автоматов, построенных на ориентированных графах синаптических связей. Предложенная схема редукции базируется на использовании динамических свойств синапсов и не зависит от индивидуальной динамики нейронов. Результатом редукции является дискретная модель в виде клеточного автомата, в которой каждый синапс описывается ограниченным набором состояний и определены правила, по которым синапс переходит из одного состояния в другое. Режимы коллективной динамики исходной нейронной сети устанавливаются из анализа состояний клеточного автомата. Метод является достаточно универсальным, может быть использован для описания процессов в разнообразных нейронных сетях и апробирован на примерах ансамблей нейронов Моррис — Лекара и Ходжкина — Хаксли (А. С. Дмитричев, Д. В. Касаткин, В. И. Некоркин).
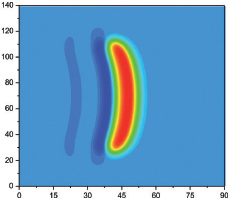
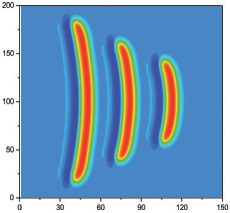
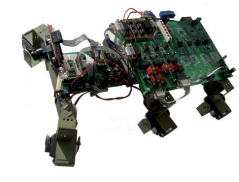
Генерация моторных паттернов и их перестройка по сенсорному сигналу в нейродинамической системе управления шагающего робота. На основе изучения динамики оливомозжечковой системы и таламокортикальных взаимодействий реализована система многопараметрического управления, использующая нелинейные динамические механизмы формирования фазовых кластеров. Разработан электронный прототип системы для управления шагающим роботом. Схема управления построена на основе сети взаимодействующих нелинейных осцилляторов со свойством фазовой автопереустановки. Моторные паттерны формируются в виде шаблонов синхронных колебаний с заданным фазовым сдвигом между осцилляторами.
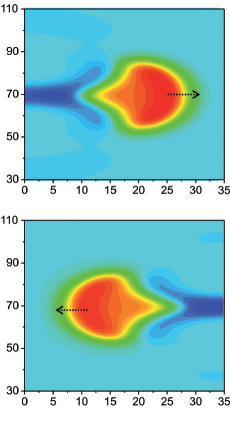
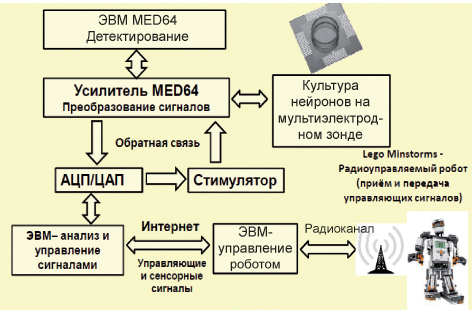
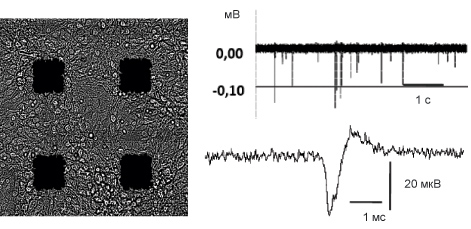
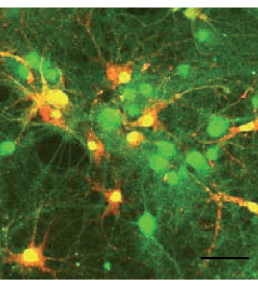
На основе базовых шаблонов, задающих направления движения робота и обработку входного сенсорного сигнала, поступающего с камеры, система формирует новые моторные шаблоны, для робота (Д. С. Щапин, А. С. Дмитричев, В. Б. Казанцев, В. И. Некоркин). Разработка моделей и макетов нейрогибридных систем. Разработан макет мультиэлектродного нейробиосенсора, способного регистрировать биоэлектрические сигналы культуры, выделять и классифицировать паттерны активности, вырабатывать сигнал управления на исполнительные устройства и стимуляции по сенсорному сигналу обратной связи. Разработан новый метод классификации паттернов на основе анализа паттернов активации и деактивации биоэлектрических разрядов культуры. Показано, что паттерны активности культуры обладают воспроизводимостью пространственно-временной структуры и временным масштабированием (скейлингом). Разработана модель спонтанной биоэлектрической сигнализации сети, и показано, что такие разряды подчиняются статистике самоорганизованной критичности и соответствуют перколяционному переходу в нейронной сети. Установлено, что благодаря эффекту синаптической пластичности в нейронных сетях могут быть реализованы полихронные импульсные последовательности с возможностью получения любых значений фазовой задержки передачи импульсного сигнала от нейрона к нейрону.
Разработаны модели внеклеточной регуляции активности нейрональных сетей за счет воздействия глиальных клеток (астроцитов) и внеклеточного матрикса мозга. Установлено, что такие воздействия могут адаптивно изменять эффективность межнейронных связей и это приводит к возможности управления передачей сигналов в нейронной сети с помощью химических (внеклеточных) факторов.
Разработана модель «виртуальной нейронной сети», способная описать формирование реалистичных нейронных архитектур в развитии на основе описания процессов диффузионного транспорта строительных белков и навигации конуса роста отростков нейронов.
Целью этих исследований является создание моделей и макетов нейрогибридных устройств, построенных на основе интерфейса живой нервной ткани (диссоциированных нейронных культур in vitro) и искусственных исполнительных устройств — мобильных роботов (В. Б. Казанцев, И. В. Мухина).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||